














Un avatar a spasso per i musei
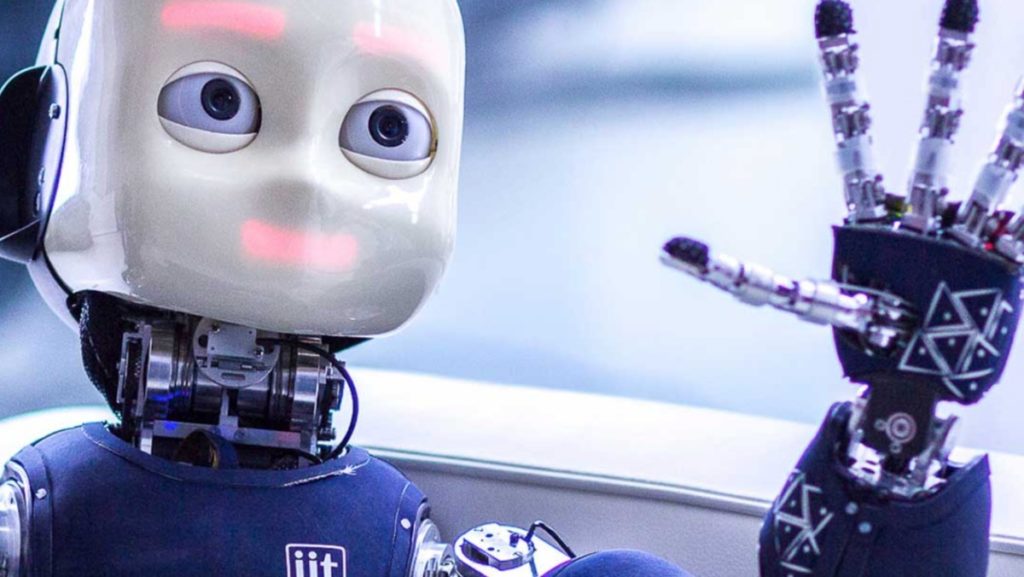
Il suo nome è “iCub3” ed è il robot umanoide che, guidato da Genova, visita la Biennale d’arte a Venezia. Un test sulla realtà virtuale per l’interazione reale uomo-macchina “in remoto”
Contenuto originale pubblicato su Stradenuove.net
È capace di controllare, virtualmente, e in remoto, le sue capacità di muoversi nello spazio, di manipolare oggetti, di percepire stimoli e anche di interagire verbalmente e fisicamente con le persone e l’ambiente (a Venezia). Lui o esso è l’ultima (al momento) versione del robot umanoide iCub 3, avatar fisico di un essere umano messo alla prova per la prima volta dal team di Artificial and Mechanical Intelligence coordinato daDaniele Pucci dell’Istituto Italiano di Tecnologia di Genova, che concentra la ricerca sulle tecnologie per la salute umana, la riabilitazione e l’interazione uomo-macchina.
Nell’ambito dell’interazione uomo-macchina si inquadra il test eseguito in collaborazione con il Padiglione Italia “Comunità Resilienti” alla 17esima Mostra Internazionale di Architettura-La Biennale di Venezia. Il luogo scelto era stimolante e complesso, e per certi versi sofisticato, ma nessun problema: il robot ha percorso gli spazi espositivi come un comune visitatore e ha ammirato le opere d’arte da intenditore, riproducendo i comandi che l’operatore gli inviava da Genova grazie a un sistema di tele-esistenza, appositamente sviluppato. E c’è da osservare che ciò avveniva in perfetto sincronismo se si considera che il ritardo della comunicazione è, avviata lungo una comune fibra ottica, di soli 25millesecondi.
Il teleoperatore, che indossava una tuta sensorizzata, iFeel, attraverso la quale trasmetteva il suo movimento corporeo al robot, il quale, a sua volta, gli forniva sensazioni tattili in modo da fargli percepire se e dove (il robot) venisse toccato da qualcuno o da qualcosa, si muoveva all’interno di una piattaforma di realtà virtuale che rileva la direzione e la velocità della camminata e permette di muovere gambe e piedi, braccia e mani. È così che operando dalla sede dell’Istituto Italiano di Tecnologia la sensoristica iFeel trasferiva i dati all’avatar robotico a Venezia che si muoveva come l’operatore a Genova.
Ma c’era di più nell’”armamentario” di questa nuova frontiera. Oltre alla tuta sensorizzata, l’operatore indossava un visore che traccia la sua mimica facciale e i movimenti della testa, anch’essi trasferiti all’avatar e riprodotti ad altissima precisione. Così il robot in contemporanea replicava quelle stesse azioni facendo apparire led che simulano le espressioni del viso – ora stupita, ora felice o triste – anche questa per l’interazione con gli esseri umani che il robot incontrava nel suo giro tra le opere d’arte.
In realtà gli occhi di iCub 3 sono telecamere che acquisiscono immagini a Venezia poi trasferite al visore dell’operatore a Genova che vede e sente quello che il robot vede e sente, ma è ciò che è parte integrante nel progetto di interazione che, ricordo, è tra uomo e macchina. Per cui il robot non solo visita e ammira le opere d’arte ma si relaziona anche verbalmente con chi incontra durante la visita, conversazione possibile anche qui grazie a sistemi che registrano la voce dell’operatore, la trasmettono all’avatar e la riproducono fedelmente.
Clicca QUI per leggere l’articolo originale.









